- Pubblicato il 14 nov 2022
- Ultima modifica 6 set 2023
- 7 min
Guida al motore a corrente continua senza spazzole
Scopri tutte le funzionalità dei motori senza spazzole e BLDC con sensori.

Nell’UE sono in uso circa 8 miliardi di motori elettrici, che consumano quasi il 50% dell’elettricità generata complessivamente nel territorio. Il 70% di questi è impiegato in azionamenti industriali. I motori c.c. senza spazzole stanno diventando sempre più popolari in questo settore ma anche in ambito automobilistico.
Cos'è un motore Brushless
Il motore a corrente continua senza spazzole, o BLDC (Brushless DC), è un motore a commutazione elettrica azionato da una fonte di alimentazione in c.c. tramite un controllore esterno.
Differenza motore a spazzole e brushless
I motori c.c. senza spazzole sono affidabili, permettono un migliore controllo di svariate funzioni e di solito hanno un tasso di efficienza del 15-20% superiore rispetto ai comuni motori con spazzole (Fig. 1). Evitando l’usura delle spazzole, sono più facili da sottoporre a manutenzione e sopportano coppie più elevate. Sono più piccoli, più leggeri e hanno un miglior rapporto potenza-peso. Inoltre, non generano scintille come i motori con spazzole. Tutte ragioni piuttosto convincenti per utilizzarli.
A differenza dei motori con spazzole, i motori BLDC utilizzano controlli esterni per la commutazione (commutazione delle fasi del motore per generare movimento).
Funzionamento motore brushless cc
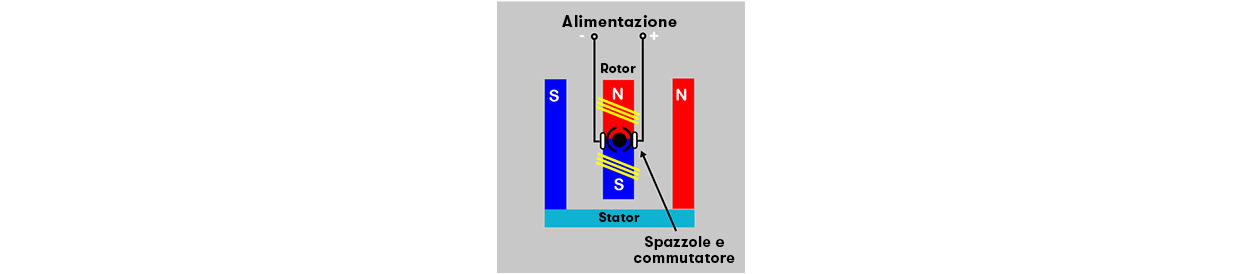
In un motore BLDC, il rotore è un magnete permanente, mentre lo statore genera un campo elettromagnetico rotante che fa ruotare il rotore (Fig. 2). Il movimento di rotazione si basa sul rilevamento della posizione del rotore e sulla conseguente regolazione del flusso di corrente negli avvolgimenti dello statore. Questa è la sfida principale nell’uso dei motori BLDC rispetto ai motori con spazzole, perché manca il contatto elettromeccanico di commutazione. Per controllare l’alimentazione tramite un microcontrollore, è possibile monitorare il flusso di corrente con sensori Hall e applicare una tensione agli avvolgimenti dello statore del motore nella giusta sequenza di commutazione.

BLDC e controllo ad orientamento di campo (FOC)
Per il rilevamento della posizione e il controllo dello statore è anche possibile ricorrere al controllo ad orientamento di campo (FOC). Il controllo ad orientamento di campo consente di controllare la coppia massima per ampere o l’indebolimento del campo per vari tipi di motori, compresi i piccoli motori c.c. senza spazzole. La progettazione di questa categoria di prodotti è tutt’altro che semplice. Richiede esperienza nel FOC o in altre avanzate e sofisticate tecnologie di controllo del motore, come il controllo diretto della coppia (DTC), così come la conoscenza del funzionamento dei sistemi di sviluppo software specializzati. Per avere un’idea della complessità dello sviluppo FOC, ecco un elenco di requisiti del produttore di Simulink, Mathworks:
- Sviluppare un’architettura di controllo con due controller PI per il loop di corrente
- Sviluppare i controller PI per i loop di posizione e velocità esterni opzionali
- Ottimizzare i guadagni di tutti i controller PI per soddisfare i requisiti prestazionali
- Progettare un modulatore vettoriale spaziale per il controllo della PWM
- Progettare un algoritmo di osservazione per stimare la posizione e la velocità del rotore se si utilizza
- il controllo sensorless
- Progettare algoritmi di controllo della coppia massima per ampere o dell’indebolimento del campo per generare id_ref e iq_ref ottimali
- Implementare trasformazioni di Park, Clarke e Park inversa computazionalmente efficienti
- Progettare la logica per il rilevamento e la convalida degli errori
- Verificare e convalidare le prestazioni del controller in diverse condizioni operative
- Implementare un controller a virgola fissa o mobile su un microcontrollore o un FPGA
Come si vede, progettare un sistema di controllo del motore completo e funzionale basato su FOC è un compito sostanzialmente impegnativo. Per questo motivo, le aziende di semiconduttori, tra cui Texas Instruments, hanno creato strumenti di sviluppo che semplificano gran parte del processo di progettazione e implementazione e facilitano l’implementazione del FOC.
Inoltre, i fornitori di IC hanno generalmente deciso di proteggere la loro proprietà intellettuale salvando le librerie software utilizzate dagli strumenti di sviluppo in ROM e rendendole disponibili solo su MCU selezionati. La soluzione InstaSPIN FOC di Texas Instruments, ad esempio, è disponibile solo nelle varianti della serie di MCU TI C2000 Piccolo a 32 bit.
Motori BLDC e Sensori Hall
I motori BLDC usano sensori Hall per avere un feedback sullo stato di commutazione. Per il controllo trifase, sono necessari tre sensori, preferibilmente già integrati nel motore I sensori sono integrati nello statore del motore e determinano la posizione del rotore. Questo viene utilizzato per controllare gli elementi di commutazione del ponte trifase e per azionare il motore. Le uscite dei sensori Hall sono di solito indicate come U, V e W.
U | V | W | |
|---|---|---|---|
| 1 | + | - | off |
| 2 | + | off | - |
| 3 | off | + | - |
| 4 | - | + | off |
| 5 | - | off | + |
| 6 | off | - | + |

Con un motore trifase, i sensori Hall possono indicare solo la posizione all’interno di ogni ciclo elettrico. In molte applicazioni, tuttavia, si richiede una determinazione esatta della posizione. Per fornire dati di posizione accurati in tempo reale, viene spesso utilizzato un encoder incrementale, che è anche integrato nel loop di controllo.
I sensori Hall sono utilizzati per la commutazione del motore e l’encoder rileva la posizione, la rotazione, la velocità e la direzione con una precisione molto maggiore. I sensori Hall forniscono solo dati di posizione per ogni cambiamento di stato – cioè, la loro precisione è limitata a sei “messaggi” per giro elettrico. Gli encoder incrementali, con risoluzioni nell’ordine di migliaia di impulsi per giro, sono quindi all’avanguardia per quanto riguarda la determinazione della posizione.
Motori passo passo – BLDC con rilevamento di posizione integrato
La struttura di un motore passo passo (Fig. 4) è simile a quella di un BLDC, ma ha molti più poli per permettere lo “stepping” ad alta precisione del motore. I motori passo passo sono progettati per “passi” progressivi, mentre un BLDC convenzionale ruota continuamente.

Un motore passo passo può mantenere la sua posizione con una coppia elevata. Grazie al funzionamento passo passo, è possibile contare i passi e determinare le posizioni con grande precisione.
BLDC per la corrente alternata – il motore a induzione
Anche il motore a induzione (Fig. 5) è molto simile a un BLDC. Tuttavia, invece di magneti permanenti nel rotore, ha avvolgimenti a bobina che inducono un campo magnetico e poi agiscono come magneti. Il motore a induzione è di solito controllato a corrente alternata e genera una velocità fissa.

Se è necessario regolare la velocità, è possibile utilizzare un controllore chiamato convertitore di frequenza (Fig. 6). Questo controllore modula la frequenza di uscita, che varia la tensione agli avvolgimenti.
I motori a induzione c.a. sono facili da controllare, ma di solito sono più pesanti e grandi dei BLDC e hanno un’inerzia più elevata.

Applicazioni dei motori c.c. brushless
I motori BLDC hanno per molto tempo avuto difficoltà ad affermarsi su scala mondiale, perché richiedono circuiti di controllo e di feedback relativamente complessi. Ma i progressi nella tecnologia dei semiconduttori, il miglioramento dei magneti permanenti e la crescente domanda di maggiore efficienza hanno portato a sostituire i motori con spazzole con i motori BLDC in molte applicazioni. I motori BLDC sono utilizzati negli elettrodomestici, nella tecnologia automobilistica, nell’industria aerospaziale, nell’elettronica di consumo, in ambito medicale e nella tecnologia di automazione industriale, solo per citare alcuni esempi.
Prodotti consigliati
Motore brushless
Motore brushless RS PRO realizzato in materiali di alta qualità, 24 V, 4000 giri/min, diametro dell'albero 5 mm.

Motore cc Maxon
Motori c.c. brushless con design piatto e corpo dal profilo basso, tensione di alimentazione 12 V, 4360 giri/min.

Motoriduttore Mellor
Motoriduttore BLDC con elettronica integrata per il controllo continuo della velocità, funzionamento eccezionalmente silenzioso e lunga dur
Motoriduttore Crouze
Combina un motore 85 V cc, elettronica integrata e numerose funzioni progettate per offrire velocità, coppia e controllo del posizionamento
Link consigliati
- Soluzioni di automazione nel Food & Beverage
- Motori a corrente alternata: guida e vantaggi industriali
- Guida completa ai motori elettrici industriali
- Guida completa ai Motori passo passo
- Come funzionano i trasformatori elettrici e campi di impiego
- Motori c.a.
- Motore c.c. Brushless RS PRO 4000 giri/min.
- Guida completa ai motori in corrente continua
